Lessons I Learned From Info About How To Check Line Of Sight

How To Check If It Is Radio Line Of Sight - Youtube

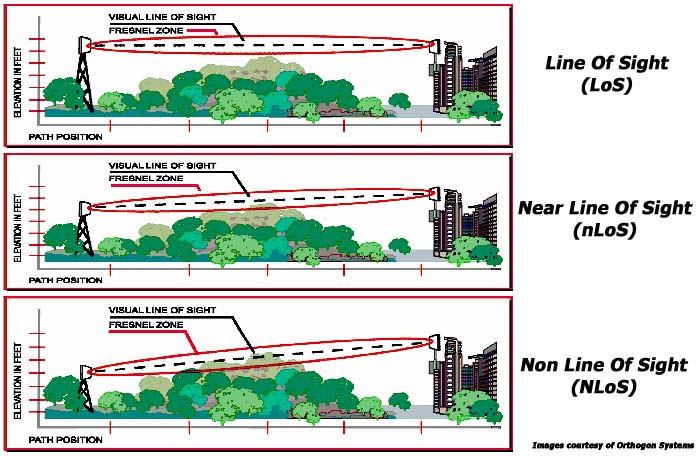
Line Of Sight - An Overview | Sciencedirect Topics

To Check Sight Distance Using Point Line Of | Civil 3d 2021 Autodesk Knowledge Network
Los Troubleshoot - Highland Internet
Two-peg Test: How To Determine The Accuracy Of Your | Onsite Installer
A field named obstr_mpid is also added to.
How to check line of sight. Backhaul) to a prospective customer. The rf surface elevation tool lets you calculate the best line of sight for radio installations.i have no doubt t. In it i went off of my previous.
2) choose view then scientific. So i want to have ability to check is something is within the line of sight of the enemy character in a 2d top down game. In most cases, line of sight refers to a portion of the visual field.
If a place is described as having an excellent line of sight, it generally has a good vantage point from. An article from the time says 'drones go m The device has no line of sight to the domain controller.
It assumes there is nothing between the radio signals and the antenna horizon. 1) navigate to your windows calculator. A look at one of my favourite online tools.
3) enter the height of the obstruction. 3) enter the height of the. How to check line of sight in google maps;
Click here to view image. If vect (0,0,0) passed in, uses current viewtarget's eye. In it i went off of my previous video on how to make straight lines to see if there’s a line of sight.
University of sioux falls softball camp; Is the actor whose visibility is being checked. Stockton university women's cross country:
1) navigate to your windows calculator. I did this for kyle n0ktk/slsrc who owes me a six pack. For variable 'i' start at 1, till less or equal to.
2) choose view then scientific. How to check if object is within line of sight. The tarisvis field describes whether the target point is visible from the observer by using a value of 1 to denote visibility and 0 for nonvisibility.
Use the graph and 3d view to identify any obstructions. // the player's direction (in which they're looking) int range = 5; I'm trying to work with an algorithm for path finding that checks the line of sight between two points, below is an implementation of this algorithm, but i couldn't understand the.
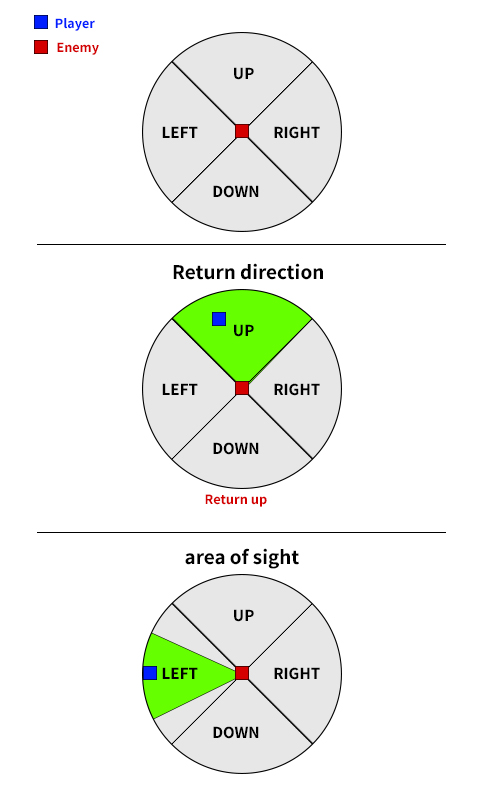
Check If Player Inside Sector Of Circle (radial Line Sight)
Line-of-sight Problem
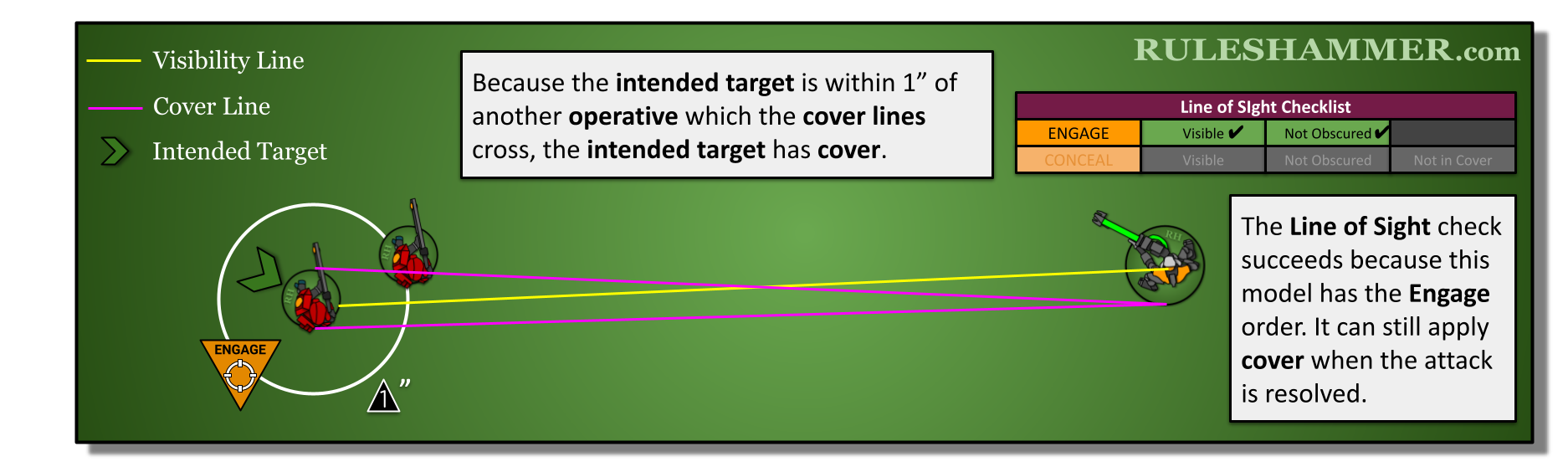
Ruleshammer Kt21: Line Of Sight | Goonhammer
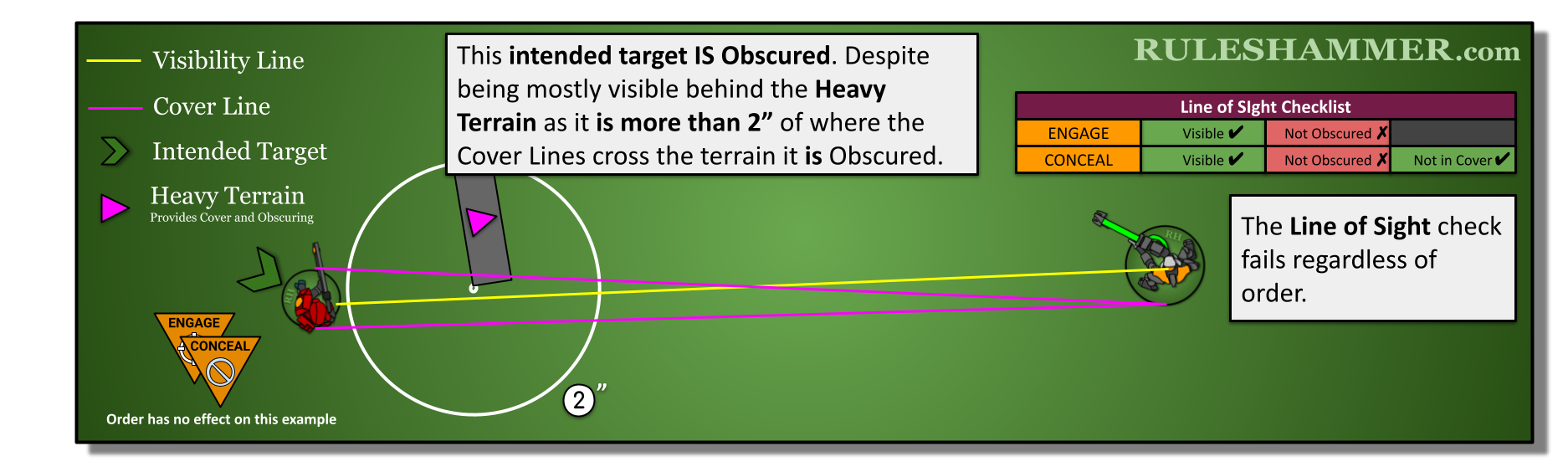
Ruleshammer Kt21: Line Of Sight | Goonhammer
Software For Checking Line Of Sight? | Ubiquiti Community
Software For Checking Line Of Sight? | Ubiquiti Community
Line Of Sight - Function
Line-of-sight Problem

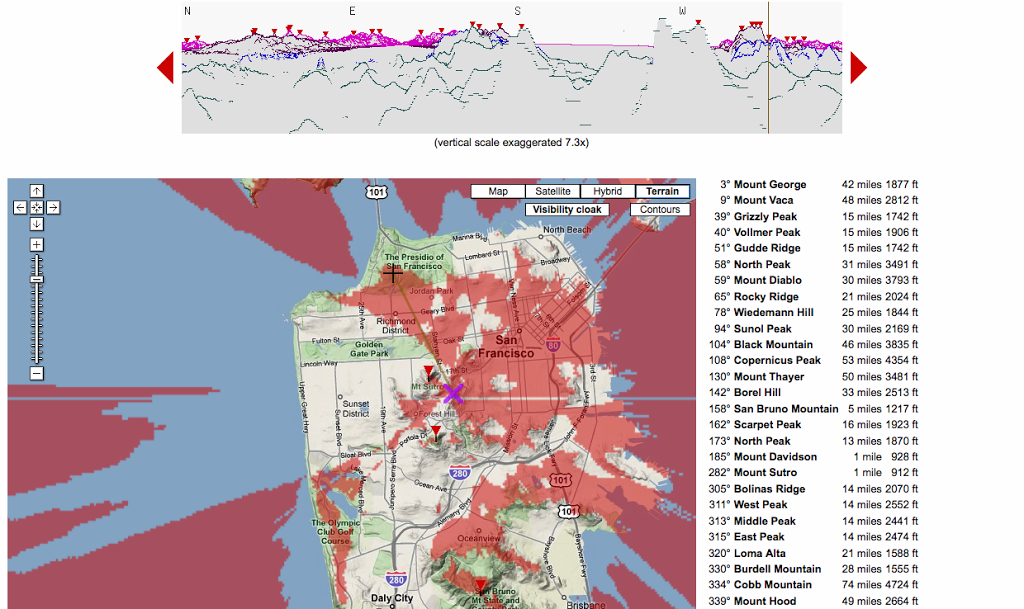
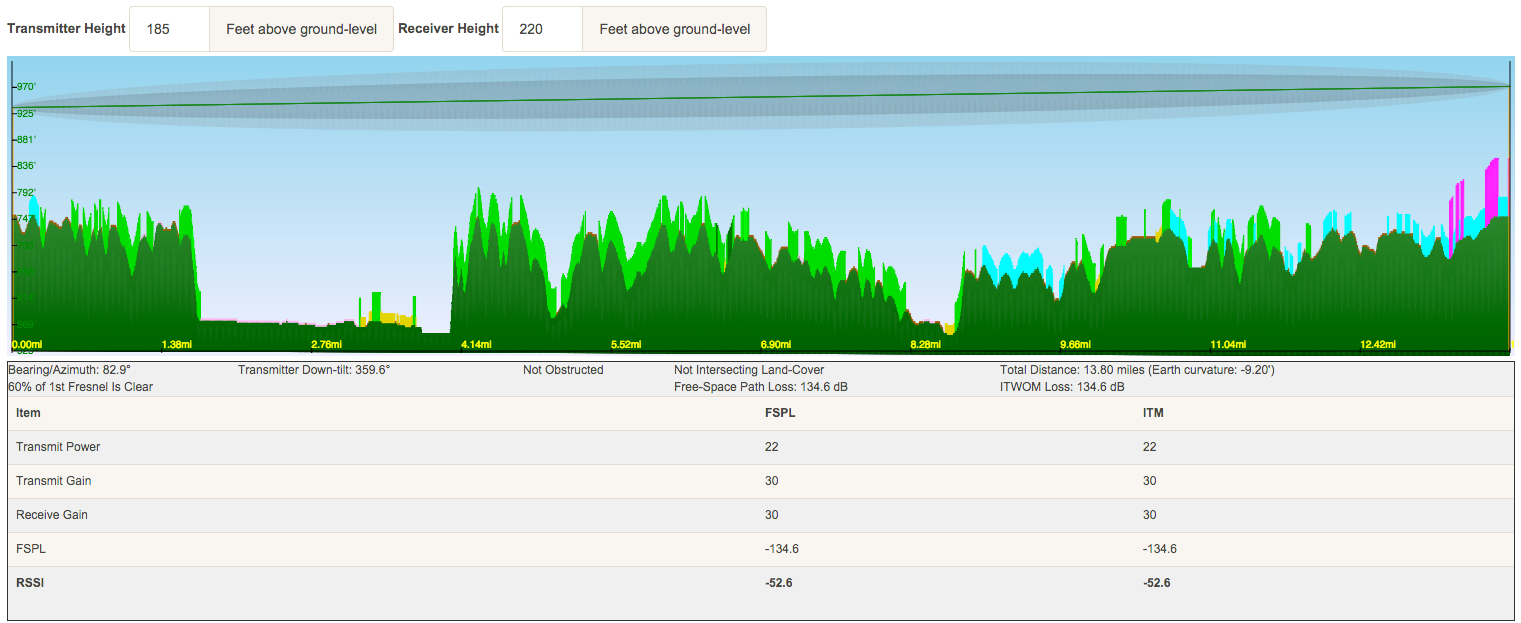
Path Profile Line Of Sight Analysis

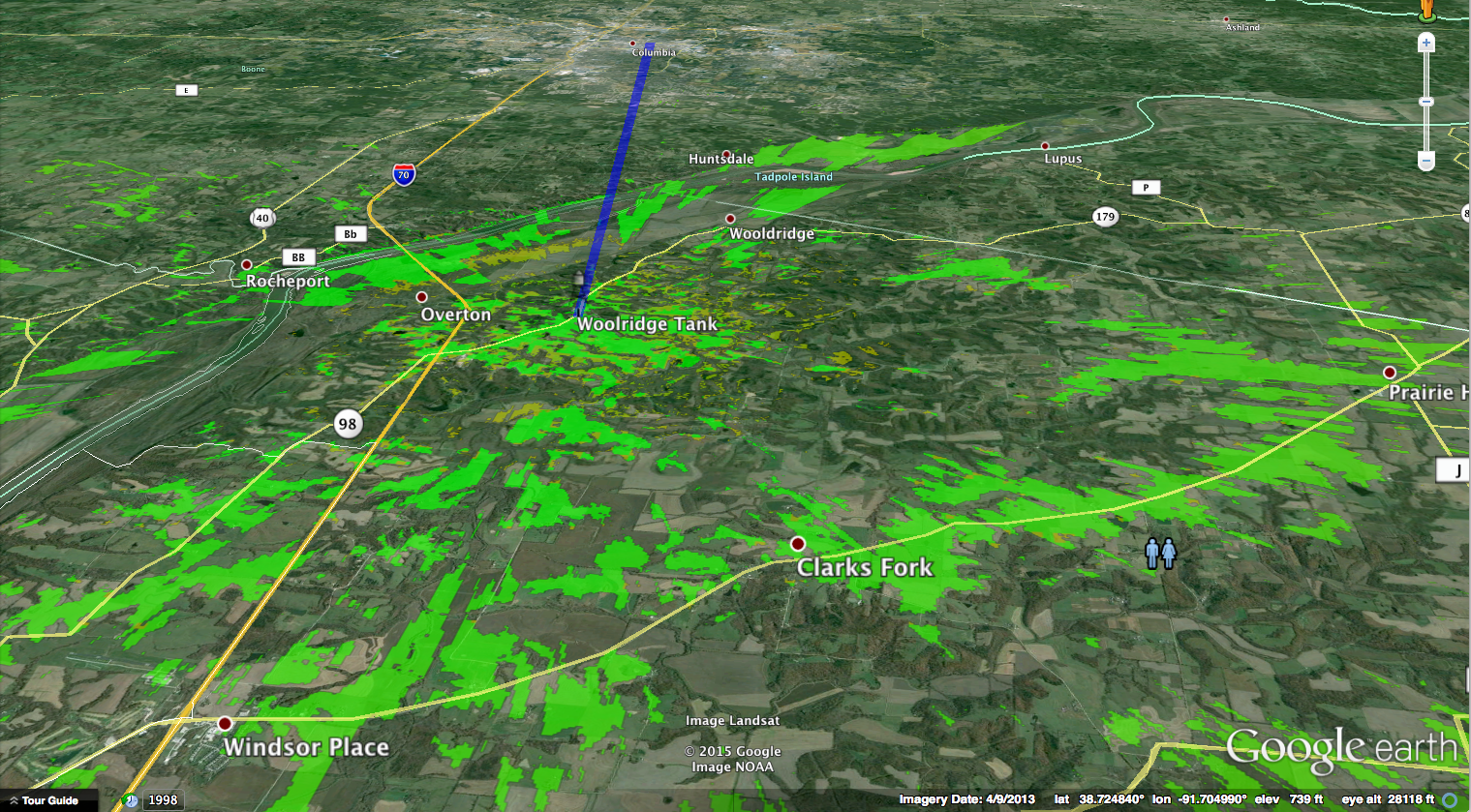
Point To Networking Line Of Sight In Google Earth - Youtube

Line-of-sight Process | Download Scientific Diagram

Tutorial: What Is Line Of Sight And How To Verify It? - Youtube

Rf Line Of Sight Calculator - Great Online Tool Youtube